


YouTube Channel


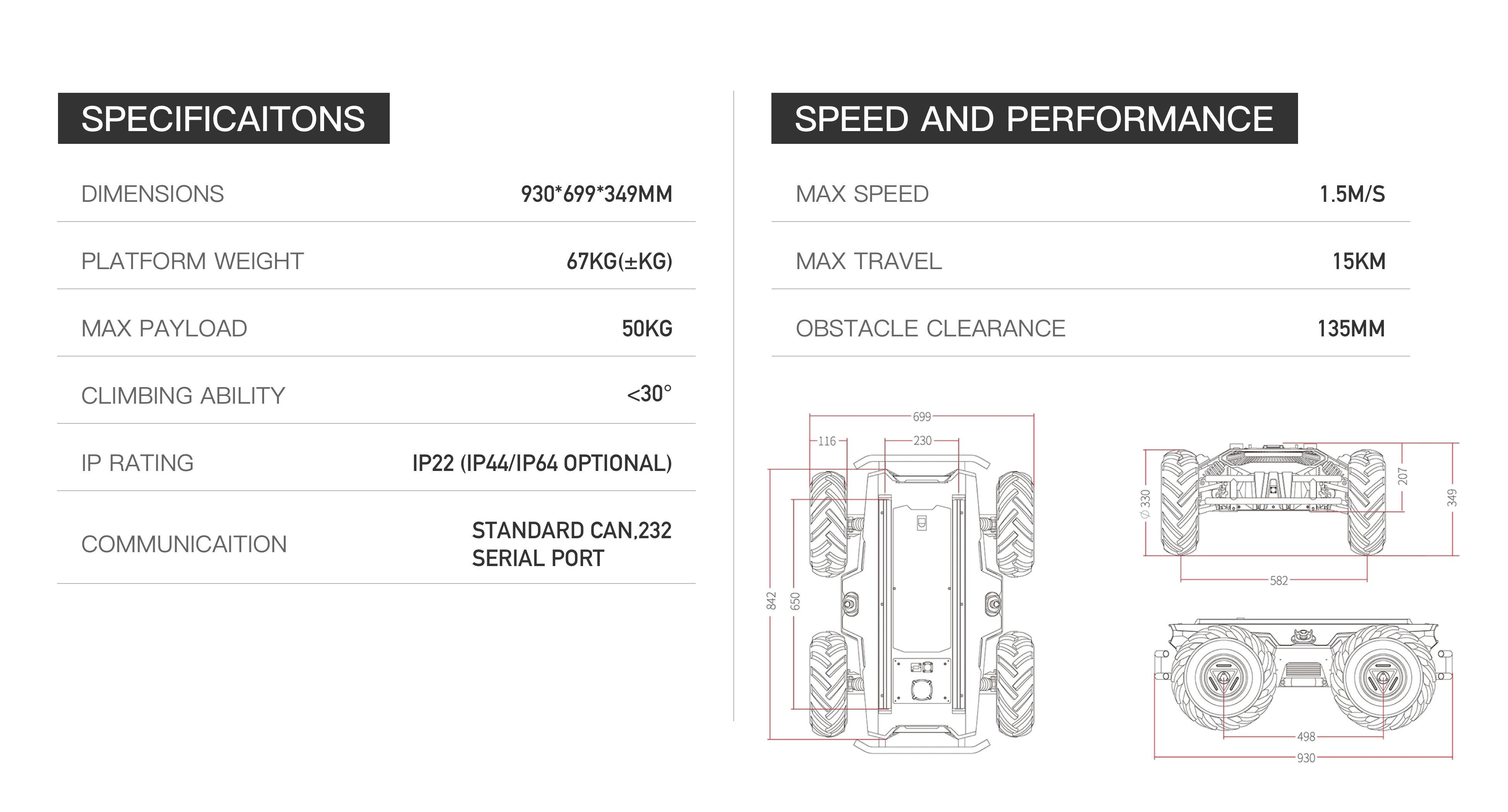
AgileX Scout 2.0 Mobile Robot UGV
AgileX Scout 2.0 Mobile Robot UGV
The All-in-one Drive-by-wire Chassis. Specially designed for industrial robotic applications in indoor and outdoor scenarios.
AgileX Scout 2.0 Mobile Robot UGV
Features
Circulatiing Cooling System
Suspention
Expansion and Secondary Development
Only logged in customers who have purchased this product may leave a review.
Related products
-

AdibotA disinfection robot
Read moreThe ADIBOT A1 is the most advanced fully autonomous UV-C disinfection robot and is equipped with cutting-edge robotics technology
-
Ubtech ukit-Beginner AI Robotic kit
Read moreUbtech ukit-Beginner AI Robotic kit
The UKIT Beginner from UBTECH Education provides students with a springboard to robotics. Designed for classrooms, the UKIT Beginner and its supporting curriculum help educators reinforce STEM instruction in an engaging and hands-on way while helping students build a foundation for developing problem-solving and computational thinking skills.
-

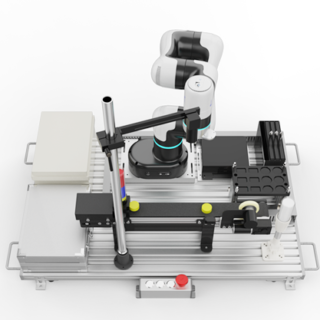
Dobot Vision Kit
Read moreDobot Vision Kit
Create Accurate Solution to See and Recognize Objects with AI
DOBOT Robot Vision Kit provides an essential software and hardware platform based on visual development. With the advantages of rich functions, stable performance, and convenient operation, it perfectly meets the needs of optical applications, including visual positioning, measurement, detection, and recognition. DOBOT Robot Vision Kit obtains a clear and intuitive design, making it easy to operate.
-

Reviews
There are no reviews yet.